|
工业机器人 |
|
| 按行业筛选 |
|
|
| 按产品筛选 |
|
|
| |
|
查看本类全部文章 |
| |
|
|
|
|
SCARA工业机器人系统解决方案 |
|
|
newmaker |
|
中国制造业转型升级,制造业自动化、智能化时代已到来。在中国,工业4.0意味着传统制造业需要进行智能化升级,制造领域智能装备必不可少,这就使得机器人产业有望在工业4.0时代迎来巨大的发展机遇。SCARA(Selective Compliance Assembly Robot Arm,中文译名:选择顺应性装配机器手臂)是一种圆柱坐标型的特殊类型的工业机器人。1978年,日本山梨大学牧野洋发明SCARA。如今SCARA机器人还广泛应用于3C行业、塑料工业、汽车工业、电子产品工业、药品工业和食品工业等领域。
SCARA介绍
SCARA机器人有3个旋转关节,其轴线相互平行,在平面内进行定位和定向。另一个关节是移动关节,用于完成末端件在垂直于平面的运动。该机器人具有四个轴和四个运动自由度,(包括沿X,Y,Z方向的平移和绕Z轴的旋转自由度)。
SCARA系统在x,y方向上具有顺从性,而在Z轴方向具有良好的刚度,此特性特别适合于装配工作。
SCARA水平多关节机器人,是一种圆柱坐标型的工业机器,主要由以下组成(见图1):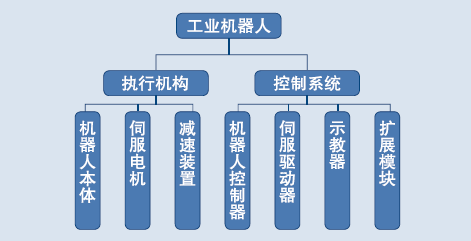
汇川在SCARA机器人应用系统介绍
一、控制系统介绍
(一)机器人控制器
IMC100机器人控制器、IS620N伺服系统、IMC100系列高速扩展模块、视觉系统、ITP100系列示教器、HMI、工业计算机、低压电源等组成。该系统支持高速总线IMC100R控制器通过EtherCAT与IS62ON系列伺服高速通信,实现机器人的精准运动控制盒姿态控制。IMC100R控制器通过Ethernet总线与工业PC、示教器、HMI等工业现场设备通讯,实现机器人的示教和监控。本地的高速扩展模块通讯通过IRLINK总线将现场的IO信号和各种传感器信号传回IMC100R控制器。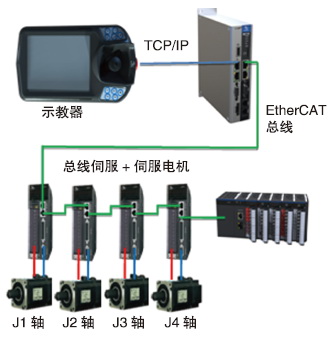
(1)高性能
① 实时性:支持16轴插补,最小控制周期125us,抖动周期小于100ns;
② 动力学:支持6自由度机器人动力学解耦控制,实现实时力矩补偿,提高机器人动态特性及轨迹跟踪精度,支持机器人动力学模型参数辨识功能,提高机器人动力学模型不准时引起的误差精度;
③ 多通道:支持一台控制器控制多台机器人,同时支持多外部轴扩展。
(2)灵活扩展
① 扩展外部轴:支持多个外部插补轴及联动轴;
② 扩展PLC:支持IEC61131-3标准,实现PLC编程功能;
③ 配置简单:伺服参数配置一体化,一键配置机器人类型。
(3)易用性
① 易操作:支持摇杆、触摸、鼠标;
② 易安装:并排安装,布线简单;
③ 易编程:菜单化编程,离线编程。
(4)工业以太网
① EtherCAT总线:实现机器人控制器、伺服系统、扩展模块的高速通信,使系统简单可靠;
② IR-Link总线:实现本地高速高精度扩展模块IO、AD、DA、编码器等的需求,高速、高精度、高可靠;
③ TCP/IP通讯:连接工业视觉终端、远程监控终端、示教器,实现互联互通。
(二)伺服驱动器
IS620N匹配机器人控制器,具有以下特点:
(1)快
• IS620N的位置环扫描周期为250us,在同步位置模式下最小可以支持250us的同步位置周期。
单轴定位周期5-6MS。
• ethercat 100M速率,一帧到底,单轴1US延时,0.1ms可以刷新100个轴。
比如:雕铣机,钻攻中心,机器人,印刷包装机械等。
(2)高性能
IS620N的位置环带宽为1.2kHz,位置环扫描周期为4kHz,速度环\电流环扫描周期为16kHz,最快定位时间可达5~6ms。能够完全满足LED,LCD,雕铣,机器人,印刷,模切等设备(见图3)。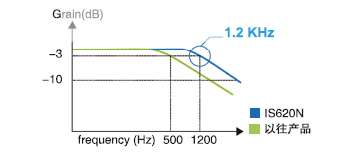
(3)精准
EtherCAT 300个节点120m距离15ns同步误差、±20ns同步抖动,在对实时性及同步性要求非常高的领域比如印刷等,可以得到很好的效果(见图4)。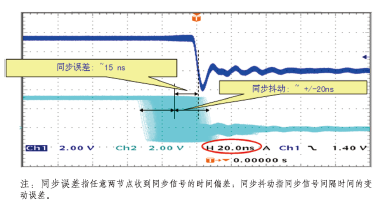
(三)示教器
参数设置与编程示教可选的示教器或基于PC平台的示教软件,可以根据需要选择(见图5)。
(四)扩展模块
可以扩展AM600的I/O模块、AD、DA等模块。
二、执行机构
(一)本体
结构件:一般存在焊接型结构件,或铸造型结构件(见图6)。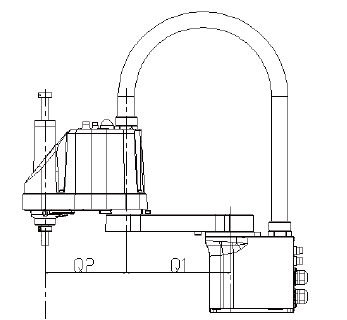
Q1:第1、2关节的轴中心距
Q2:第2、3关节的轴中心距
Q3:丝杠零点的Z轴位置坐标
Q4:丝杠的导程
(二)伺服电机
1. 电机核心是我们自主研发的编码器:
汇川绝对值编码器工作原理:
系统采用游标原理实现单圈绝对位置功能。假设第一道与第二道栅格分别为1024与1023,则在每个光栅(如1024栅格与1023栅格的第10个栅格)彼此相同的第X个栅格间,有唯一固定范围的相位差值,来实现绝对位置的识别,原理同游标卡尺。如1023/1024,在第X个栅格相位差范围为:(2π/1023)(X-1)<θ<=(2π/1023)*X.。实际上1024和1023两个码道即可实现10位分辨率的绝对位置信息。
2. 特点
① 绝对值编码器分辨率为23位,相当于0.015角秒。
② 省掉机械开关和原点。
③ 耐温120度,抗震达到10G
(三)减速机(减速,增大转矩)
把电动机、内燃机等高速运转的动力通过输入轴上的小齿轮啮合输出轴上的大齿轮来达到减速的目的,并传递更大的转矩。
类型:圆柱齿轮减速器、涡轮减速器、行星减速器、行星齿轮减速器、RV减速器、摆线针轮减速器和谐波减速器。其中:RV减速器和谐波减速器是精密减速器中重要的两种减速器。
三、汇川产品配置(见表1 )
四、SCARA参数设置
1)机器人型号设置<设置>-<机器人设置>-<机器人型号>
a.选择类型:串联b.轴数:四轴c.外部轴:无
2)结构参数设置<设置>-<机器人设置>-<结构参数>
J1 : 225J2 : 175J3 : 0J4 : 16
3) 减速比设置<设置>-<机器人设置>-<减速比>
J1 : 50J2 : 50J3 : 16J4 : 20
4) 编码器位数设置<设置>-<编码器设置
J1 : 23J2 : 23J3 : 23J4 : 23
5) 机器人零点标定(见图7)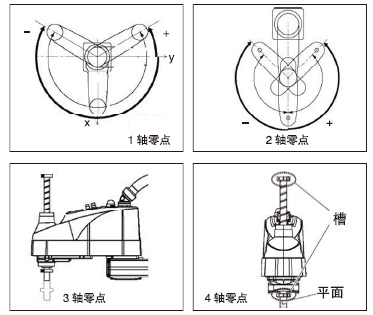
(1)第1关节的机构零点位置:
与机器人坐标系的X坐标轴重叠。
(2)第2关节的机构零点位置:
第1、2关节完全伸直的位置
(3)第3关节的机构零点位置:
丝杠的行程上限位置
(4)第4关节的机构零点位置:
轴的平面(或上下机械挡块的槽)朝向第2机械臂的位置
6)左右手方法校准第二关节精度:
需对机器人的作业点进行坐标计算时,第2关节的精度是非常重要的。
7)轴极限设置<设置>-<轴极限设置>
机器人标定后,伺服在不使能状态下,手动推到挡块极限位置,保持好停止时的余量,从编程界面读取轴极限的位置进行设置,单位全部为角度。
8)运动参数设置<设置>-<运动参数>
速度设置最大允许速度为再现运行状态下机器人末端直线运行的最大速度,单位:mm/s
最大运行姿态速度为再现运行状态下机器人姿态运行的最大速度,单位:deg/s
关节允许速度为再现运行状态下各关节最大关节速度,单位deg/s,
该参数的设置通常通过电机额定转速、减速比进行计算
以第一轴速度为例:
加减速度设置:
加速度初始参数设置按照加加速时间T1=50ms,即加速时间100ms加速到最大速度求出Jerk,程序内加加速度Jerk为加速度a的80倍。以一轴加速度为例:
然后根据伺服转矩使用情况和机械结构振动情况进行调整,调整时还需配合伺服的刚度等级设置,以1轴为例900加速度时振动较大,减小加速度,最终调至720。减速度根据最高速运行时,停止距离进行调整,初始设置为加速度的5倍左右。
五、系统方案优势
1)控制器采用ARM的A8系统,内核采用Linux实时内核,保障操作系统的实时性,插补周期1ms;
2)汇川提供全套电气产品以及高精、高速、智能的完整自动化取放解决方案;
3)开放的二次平台,可以轻易获得除机器人本体之外的,灵活的逻辑控制
4)SCARA机器人的ETHERCAT总线化,降低国产机器人的总体成本,提高国产机器人的竞争力;
5)汇川提供综合设计能力(EMC)以及工艺实施;
6)拥有驱动器电流环核心算法和23位绝对值编码器核心技术,实现精准定位;
7)汇川能为客户提供机器人测试标准体系以及动力学,聚焦工艺开发;
8)控制器IMC100与IS620N采用EtherCAT实时以太网,具备与电流环同步的水准,可以轻易实现动力学的控制;
9)及时交付货物能力;
10)汇川作为本土化上市公司为客户提供持续不断的产品改进和方案优化,更好的为客户服务;
11)汇川是为拥有自主研发与生产控制系统和伺服马达的国产企业,特别运动控制解决方案上的能力已可媲美欧美水平。
六、机器人发展趋势
机器人在近些年开始走进大众视野,并随着人工智能技术、先进制造技术和移动互联网的创新融合而飞速发展。越来越多的服务型机器人被研发出来,开始改变人类的社会生活方式。随着人工成本的上涨、工作环境的改变、人口老龄化和多元化的市场竞争,各企业面临着重重压力。工业机器人产业是一个快速成长中的新兴产业,将对未来生产和社会发展起越来越重要的作用。我国机器人使用密度处于极低水平,机器人使用密度的提升将带动机器人需求量的提升。“中国制造2025”发布也确立了机器人等十大行业作为下一阶段的重点发展方向,在政策利好相继影响下,机器人也将迎来新一轮的爆发期。(end)
|
|
| 文章内容仅供参考
(投稿)
(11/20/2015) |
对 工业机器人 有何见解?请到 工业机器人论坛 畅所欲言吧!
|