|
工业机器人 |
|
| 按行业筛选 |
|
|
| 按产品筛选 |
|
|
| |
|
查看本类全部文章 |
| |
|
|
|
|
重型机器人完美演绎3D锯切 |
|
|
newmaker |
|
为了实现指向过程的完全自动化需要一个解决方案,对此,Wieland Anlagentechnik 开发、营销和销售部主管Andreas Wiedmann 解释:“当在切削加工状态下夹紧时工件无法被对齐,而只能固定到位,这样就使得有必要将锯刀调整至工件的空间位置,在过程中不断调节材料厚度以及锯刀方向。”与原来的半自动化解决方案相比,还需要为工人实施显著的人体工程学方面的改进。“为了能在空间中自由和独立地执行锯切任务,使用机器人的解决方案是我们考虑的唯一选项,”Wiedmann 继续解释道。与其他自动化解决方案相比,工业机器人的六个轴能提供最大的灵活性。同时,机器人需具有高的路径精度和稳定的低振动结构。由于对铜工件的识别有着严苛的要求,因此事先必须进行测试,这些测试在库卡机器人有限公司的试验实验室中完成。从首次的可行性研究至现场集成支持,库卡工程部的图像处理专家在场随时提供协助。
一捆铜条首先被喂入系统中,之后操作员在机器人操作器的辅助下将其分开,之后其被运至夹持夹具位置,在此处通过滚轮轨道将其喂入夹具汇总。为了检测到铜条的确切位置,Wieland Anlagentechni 利用安装在库卡机器人上的以及由该机器人导向的KUKA.VisionTech 系统。来自摄像头系统的数据被转发给主机,由软件解析,之后输出为3D 锯切曲线——这种过程在自动化解决方案之前仍然通过手动标记的方式完成。锯切刀具依据CAD 数据定义,并且被转移给库卡机器人。之后机器人对带锯执行四个面向空间的曲线切割。在下一步中,产生的指向核心产生了空间上的方向,并经过轧制,从而对软铜进行硬化处理。
Wieland Anlagentechnik 选择使用有效负载能力为360千克的库卡KR FORTEC 系列重型机器人,对重型的深喉式MEBA 带锯( 中心间距离为1.35 米,外尺寸超过2.00米) 进行导引,并以最佳的方式吸收过程力。此款机器人因其低振动运动特征及对锯的安全导引而出众。产品名称KRFORTEC 源自单词“力量(force)”和“优势(forte)”,代表着力量和动力。与之前的系列相比,KR FORTEC 家族的优势很明显。将内联腕部从皮带转换成齿轮技术无需每年更换皮带并降低了维护成本。在相同的有效负载和可达距离下,库卡与之前的系列相比,能将轴速度提高多达18%,这样就明显缩短周期时间。库卡产品组合中命名规则的改变以及保持不变的接口简化了规划以及向KR FORTEC 的用户友好性的切换。其一贯的共享零件策略降低了维护和备品备件成本。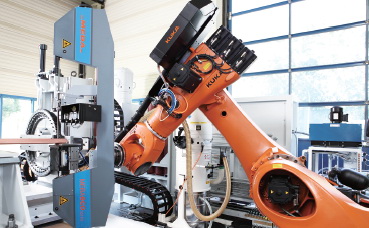
为了检测到工件,Wieland Anlagentechnik 也利用KUKA.VisionTech 功能包,此功能包包括软件和摄像头。KUKA.VisionTech 能操作静止摄像头以及直接安装在机器人上的摄像头。集团解决方案能在无单独计算机硬件的情况下工作,从而减少所需的额外工作量,因为不需要使用外部的图像处理系统。KUKA.VisionTech 是基于图像处理领域全球市场领导者Cognex 公司的图像处理库开发的。此款应用程序设计地易于使用——这对于库卡来说是典型的应用。
利用机器人和库卡图像识别系统,Wieland Anlagentechnik公司已经能对指向过程实现完全的自动化。“利用这种方式,尽管工件朝向不同,但我们能达到更高的流程重复度,还能提高工作场所的人体工程学特性,”Wiedmann 总结道。而且,工件的高度可重复性也提高了下游步骤即指向核心的滚压和使用模具对指向核心进行拉丝处理等步骤的可靠性。(end)
|
|
| 文章内容仅供参考
(投稿)
(10/9/2015) |
对 工业机器人 有何见解?请到 工业机器人论坛 畅所欲言吧!
|