|
жңәеҷЁи§Ҷи§ү |
|
| жҢүиЎҢдёҡзӯӣйҖү |
|
|
| жҢүдә§е“ҒзӯӣйҖү |
|
|
| |
|
жҹҘзңӢжң¬зұ»е…ЁйғЁж–Үз« |
| |
|
|
|
|
и§Ҷи§үйҫҷVD100е®ҡдҪҚзі»з»ҹеңЁжҝҖе…үз„ҠжҺҘдёҠзҡ„еә”з”Ё |
|
|
дҪңиҖ…пјҡ |
|
жҝҖе…үз„ҠжҺҘжҳҜдёҖз§ҚзҒөжҙ»зҡ„еҠ е·Ҙж–№жі•пјҢе№ҝжіӣеә”з”ЁдәҺзҺ°д»ЈеҠ е·ҘпјҢжң¬йЎ№зӣ®дёә3CйҮ‘еұһе°Ҹе·Ҙ件зҡ„жҝҖе…үз„ҠжҺҘпјҢе·Ҙ件йҖҡеёёжҜ”иҫғз»Ҷе°ҸпјҢз„ҠжҺҘиҪЁиҝ№зІҫеәҰиҰҒжұӮжҜ”иҫғй«ҳпјҢзҺ°жңүдҪңдёҡж–№ејҸд»ҚжҳҜд»Ҙдәәе·ҘиЈ…еӨ№е№¶д»ҘдәәзңјеҜ№дҪҚзҡ„ж–№ејҸз”ҹдә§еҠ е·Ҙдёәдё»гҖӮйҷӨдәҶиЈ…еӨ№еҜ№дҪҚе·ҘеәҸиҫғз№ҒзҗҗпјҢз”ҹдә§ж•ҲзҺҮдҪҺгҖӮеҸҰеӨ–пјҢеҸ—дәәе·Ҙй•ҝж—¶й—ҙе·ҘдҪңеј•иө·зҡ„и§ҶеҠӣз–ІеҠізӯүеӣ зҙ еҪұе“ҚпјҢз„ҠжҺҘе“ҒиҙЁдёҖиҮҙжҖ§зЁіе®ҡжҖ§д№ҹеҫ—дёҚеҲ°жңүж•ҲдҝқиҜҒгҖӮжүҖд»Ҙжң¬йЎ№зӣ®йҮҮз”Ёж·ұеңіи§Ҷи§үйҫҷе…¬еҸёзҡ„VD100и§Ҷи§үе®ҡдҪҚжҠҖжңҜпјҢдёәжҝҖе…үз„ҠжҺҘи®ҫеӨҮзҡ„иҝҗеҠЁжҸҗдҫӣе®ҡдҪҚеҸӮж•°пјҢе®һзҺ°й«ҳзІҫеәҰзҡ„жҝҖе…үз„ҠжҺҘгҖӮ
жңәеҷЁи§Ҷи§үзҡ„еј•е…ҘпјҢеҸ–д»ЈдәҶдәәе·ҘиӮүзңјеҜ№е·Ҙ件зҡ„иҜҶеҲ«еҸҠеҜ№дҪҚе·ҘдҪңпјҢй…ҚеҗҲиҮӘеҠЁеҢ–иЈ…еӨ№жңәжһ„зҡ„еә”з”ЁпјҢе®һзҺ°е·Ҙ件жҝҖе…үз„ҠжҺҘзҡ„е…ЁиҮӘеҠЁеҢ–гҖӮеҸҜеӨ§е№…жҸҗй«ҳз”ҹдә§ж•ҲзҺҮеҸҠз„ҠжҺҘе“ҒиҙЁзЁіе®ҡжҖ§гҖӮ
жңәеҷЁи§Ҷи§үеңЁжӯӨиҝҮзЁӢдёӯзҡ„дё»иҰҒеҠҹиғҪжҳҜпјҡеҜ№е·Ҙ件жқҘж–ҷзҡ„иҮӘеҠЁиҜҶеҲ«пјҢеҢәеҲҶдёҚеҗҢе·Ҙ件зҡ„з„ҠжҺҘеҢәеҹҹпјҢ并иҮӘеҠЁзІҫзЎ®жҗңзҙўе®ҡдҪҚеҗ„е·Ҙ件预и®ҫзҡ„еҫ…з„ҠжҺҘеҢәеҹҹгҖӮиҮӘеҠЁзІҫзЎ®е®ҡдҪҚз„ҠжҺҘеҢәеҹҹеҗҺпјҢеҶҚйҖҡиҝҮж•°жҚ®йҖҡи®Ҝе®һж—¶иҫ“еҮәз„ҠжҺҘдҪҚзҪ®еқҗж Үеј•еҜјжҝҖе…үиҝӣиЎҢйў„и®ҫиҪЁиҝ№зҡ„зІҫзЎ®з„ҠжҺҘгҖӮ
еңЁиҝӣйҳ¶з„ҠжҺҘеә”з”ЁдёӯпјҢиҝҳеҸҜд»ҘйҖҡиҝҮиҪҜ件еҚҮзә§пјҢеңЁз„ҠжҺҘе®ҢжҲҗеҗҺеҜ№з„ҠжҺҘз—•иҝ№иҝӣиЎҢе°әеҜёгҖҒдҪҚзҪ®е’ҢеӨ–и§Ӯзҡ„еӨҚжЈҖжЈҖжөӢгҖӮе®һзҺ°еңЁз”ҹдә§иҝҮзЁӢдёӯеҜ№з„ҠжҺҘиҙЁйҮҸзҡ„е®һж—¶зӣ‘жҺ§пјҢеӨ§е№…жҸҗй«ҳз”ҹдә§иүҜе“ҒзҺҮгҖӮ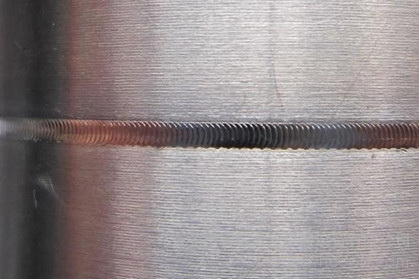
и§Ҷи§үйҫҷVD100и§Ҷи§үе®ҡдҪҚзі»з»ҹзҡ„е·ҘдҪңеҺҹзҗҶ
иҜҘж–№жЎҲз”ұи§Ҷи§үзі»з»ҹпјҢжҝҖе…үз„ҠжҺҘзі»з»ҹпјҢиҝҗеҠЁжңәжһ„дёүйғЁеҲҶз»„жҲҗпјҢйҖҡиҝҮи§Ҷи§үзі»з»ҹзҡ„ж Үе®ҡе»әз«ӢиҒ”зі»гҖӮж Үе®ҡеҲҶдёӨйғЁеҲҶпјҢйҰ–е…Ҳи§Ҷи§үзі»з»ҹе’ҢжҝҖе…үз„ҠжҺҘзі»з»ҹйҖҡиҝҮй«ҳзІҫеәҰзҡ„д№қзӮ№ж Үе®ҡз®—жі•пјҢз»ҹдёҖи§Ҷи§үзі»з»ҹеқҗж Үзі»е’ҢжҝҖе…үз„ҠжҺҘеқҗж Үзі»гҖӮеҸҰдёҖйғЁеҲҶж Үе®ҡжҳҜи§Ҷи§үзі»з»ҹе’ҢиҝҗеҠЁжңәжһ„зҡ„з„ҠжҺҘеҺӢеӨҙй—ҙзҡ„еқҗж Үзі»ж Үе®ҡгҖӮ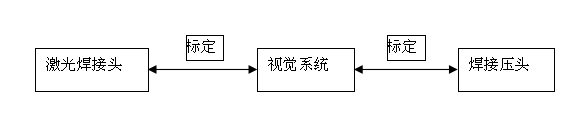
е®һйҷ…з„ҠжҺҘз”ҹдә§дёӯпјҢе…Ҳе®ҡдҪҚи®Ўз®—еҮәз„ҠжҺҘзҡ„дҪҚзҪ®е’Ңи§’еәҰпјҢе°ҶеҒҸ移йҮҸеҸ‘йҖҒз»ҷиҝҗеҠЁжңәжһ„пјҢиҝҗеҠЁжңәжһ„еҲ©з”ЁдҪҚзҪ®еҒҸ移йҮҸи°ғж•ҙз„ҠжҺҘеҺӢеӨҙдҪҚзҪ®пјҢжҝҖе…үз„ҠжҺҘзі»з»ҹеҲ©з”ЁдҪҚзҪ®е’Ңи§’еәҰеҒҸ移йҮҸи°ғж•ҙз„ҠжҺҘеӣҫеҪўд»Ҙз„ҠжҺҘеҮҶзЎ®зҡ„дҪҚзҪ®гҖӮ
е®ҡдҪҚи®Ўз®—иҝҮзЁӢдёӯдҪҝз”ЁеҮ дҪ•иҪ®е»“еҢ№й…Қе®ҡдҪҚз®—жі•пјҢйҮҚеӨҚе®ҡдҪҚзІҫеәҰ1/40дәҡеғҸзҙ пјҢдёҚеҸ—е…үзәҝдёҚеқҮеҢҖзҡ„е№Іжү°гҖӮеҸҰеӨ–пјҢз»“еҗҲжүҫзәҝжүҫзӮ№е·Ҙе…·пјҢж–№дҫҝеҮҶзЎ®е®ҡдҪҚеҗ„з§Қзү№еҫҒгҖӮ
еңЁжӯӨеә”з”ЁиҝҮзЁӢдёӯпјҢжңәеҷЁи§Ҷи§үдёҚдҪҶеӨ§е№…йҷҚдҪҺз”ҹдә§зҡ„дәәеҠӣжҲҗжң¬пјҢеҗҢж—¶иҝҳжҸҗй«ҳдәҶз”ҹдә§зҡ„ж•ҲзҺҮе’ҢиүҜе“ҒзҺҮгҖӮ(end)
|
|
| ж–Үз« еҶ…е®№д»…дҫӣеҸӮиҖғ
(жҠ•зЁҝ)
(9/7/2016) |
|
| ж·ұеңіеёӮи§Ҷи§үйҫҷ科жҠҖжңүйҷҗе…¬еҸё иҒ”зі»ж–№ејҸпјҡ
|
| зҪ‘еқҖпјҡ |
http://www.visiondragon.com
|
з”өиҜқпјҡ86 -0755 -82721850 |
| ең°еқҖпјҡ |
дёӯеӣҪВ·жұҹиӢҸВ·дёӯеӣҪ.ж·ұеңіеёӮйҫҷеҚҺеҢәж°‘жё…и·Ҝе…үиҫү科жҠҖеӣӯ2ж Ӣ2еҚ•е…ғ6жҘј |
|
|
|
еҜ№ жңәеҷЁи§Ҷи§ү жңүдҪ•и§Ғи§ЈпјҹиҜ·еҲ° жңәеҷЁи§Ҷи§үи®әеқӣ з•…жүҖж¬ІиЁҖеҗ§пјҒ
|