|
液体/气体检测分析仪器 |
|
| 按行业筛选 |
|
|
| 按产品筛选 |
|
|
| |
|
查看本类全部文章 |
| |
|
|
|
|
使用自主移动检查机器人对技术设施进行气体泄漏远程探测与定位 |
|
|
newmaker |
|
工业设施的气体检漏不但危险耗时,而且容易出现人为错误,并可能出现多种解读。为了提供一种更安全、更高效和更可靠的解决方案,RoboGasInspector借此应运而生。这一创新的气体泄漏远程探测与定位机器人系统是由多家德国公司和研究所联合研发而成,并采用了FLIR GF320光学气体红外热像仪。
一个由9家公司和研究所组成的联盟开发出了一款用于大型技术设施气体泄漏探测和定位的自主移动机器人原型。该联盟提出了一套无需直接进入危险区域,也无需人类参与,就能执行工业设施检查任务的系统。这款机器人可用于设施的例行检查或特定系统部件的针对性检查。系统的独立机动性通过应用各种导航传感器和借助远程控制随时进行的人工干预来实现。系统还配备视频与光学气体遥测装置,使其能够检查此前由于受进入限制而难以检查的系统部件。
创新性监视进程的发展充分利用最先进的测量与自动化技术和遥控技术,此外,机器人学技术也提高了各种检查的可靠性、效率和成本效益。与此同时,对于单调又耗时的劳动密集型任务,它还可减轻技术人员的工作量。
RoboGasInspector由三个模块构成:链传动移动平台、导航模块和检查模块。注意该装置顶部的FLIR GF320红外热像仪。
这是一项合作性研究计划的起点。该计划由卡塞尔大学机械工程系的AndreasKroll博士和Ludger Schmidt博士主持,并获得了德国联邦经济技术部240万欧元的补贴。 卡塞尔大学测量与控制技术系博士Andreas Kroll解释道:“这个计划的目的是开发和测试一种创新的带有检查机器人的人机系统。这些机器人具有远程气体测量和本地智能功能。气体泄漏的探测和定位在很大程度上应该由移动机器人独立完成。在这个过程中,移动机器人还应该分析测得的数据,记录检查结果。”
在有毒或爆炸性气体使用之处应格外小心谨慎。这正是化工行业、生物气体工厂和天然气供应商需采用严格检查规范的原因。预防性检查方案通常需要人员每天执行耗时的例行检查程序。执行这些定期检查时,员工要检查系统是否正常运转,因此员工通常依靠自己的理解和经验,而不使用测量技术。对Andreas Kroll和LudgerSchmitt教授来说,对这套新系统的首先需满足的要求是:它应该能够执行自动化、无危险的检查和监控,并且应能够独立应对问题。
安全和效率
工业厂房(如化工厂、炼油厂、气体压缩站)的操作员将其员工和生产设施的安全放在首位。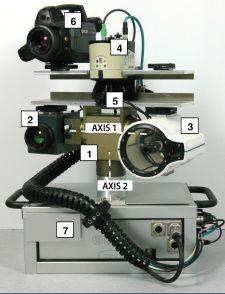
多传感器检查模块:方位/俯仰云台(1)装有一台热像仪(2)、一台活动的TDLAS测量仪器(3)、一个激光测距仪(4)、一部摄像机(5)和用于气体可视化的FLIR GF320红外热像仪(6)。计算机和其他电气/电子模块安装在配电箱(7)内。
LIR GF320在泄漏现场将不可见气体可视化,泄漏气体显示为黑色烟雾。
执行诸如反复检查等例行程序时,总会存在由于注意力不集中,不慎忽略潜在危险源的可能性。因此,创新性检查技术的发展,以及对操作员在技术系统管理方面的灵活性和表现的重视,不仅具有经济意义,还可减轻人力执行重复性例行任务的工作量,提高各种检查任务的覆盖范围。
初试身手
RoboGasInspector首次在卡塞尔大学的一间礼堂里展示。这款机器人独自走完了一段检查路径,成功越过了各种障碍和一个斜坡。 在指定的检查现场,这款机器人检查了各种管道,发现了一处甲烷泄漏。在接下来的数月间,在实验室环境中,这一成果被扩展应用于数平方公里的大型工业设施,其中包含了风和阳光以及系统运行产生的混合因素等环境因素。
传感器系统水平摇摄角度(俯视)和俯仰角度(下方侧视)
RoboGasInspector的驱动系统和导航
RoboGasInspector由三个模块构成:链传动移动平台、导航模块和检查模块,后者集成了FLIR GF320光学气体红外热像仪。链传动平台装有电力驱动装置和常规电池。导航模块由2D激光扫描仪(正面和背面,对于在建筑物内部导航尤为重要)和一个用于户外导航的GPS。RoboGasInspector不断将待检查的现场与数字地图进行对比,使这台链条驱动。
检查模块
检查模块在方位/俯仰云台装置上集成了各种计量仪器,包括一个远程甲烷泄漏探测器(RMLD),该探测器是基于一台活动的可调谐二极管激光吸收光谱(TDLAS)仪。它是通过一个红外线激光器起作用:激光束投射到某个表面,被反射回来,然后测量其剩余强度。此外,检查模块上还安装有FLIR GF320红外热像仪,以此将气体可视化。
为了确保RoboGasInspector自身不会产生危险,其还装配有内置气体传感器,该传感器在爆炸下限(LEL)超过10%时关闭整个系统,从而防止可能引燃周围环境的潜在危险。
独立测量
机器人可独立完成测量数据的处理和模式识别。RoboGasInspector还会自动执行指定路线检查,并实施测量。尽管如此,机器人依然持续不断地与控制室保持联系,如有必要,可从控制室进行远程控制。为此,方位/俯仰云台测量模块上还集成了一台摄像机。但在正常运行模式下,RoboGasInspector独立工作,只将所有测量数据通过WLAN传送至控制室。
RoboGasInspector的现状与未来
在此期间,系统原型在大量测试中所展示的用途和功能已给人们留下了深刻的印象。在测试中,驱动装置、导航系统和补充传感器系统表现出色。
在原本难以进入的场地,RoboGasInspector有助于独立气体检漏和泄漏定位。此外,它还有助于避免在具有潜在危险的环境中投入人力进行检查。但在部署于工业环境之前,还需要进一步的研发(例如在爆炸保护、软件开发等方面),并且在部署于商业环境之前,无疑还必须澄清法律问题。尽管如此,自主移动气体探测和泄漏定位机器人在今天已经成为可能,并可显著提高安全性。
FLIR Systems GF320红外热像仪是RoboGasInspector的关键组件。它帮助系统从安全距离探测有时候具有危害性的气体泄漏。(end)
|
|
| 文章内容仅供参考
(投稿)
(如果您是本文作者,请点击此处)
(12/17/2015) |
对 液体/气体检测分析仪器 有何见解?请到 液体/气体检测分析仪器论坛 畅所欲言吧!
|