汽车电子 按行业筛选
请选择行业
----------------------
-全部行业
------------------
-机床与金属加工设备
-刀具/量具/夹具/磨具
-模具设计与制造
-塑料机械/橡胶机械
-通用机械/化工机械
-工程机械/建材机械
-交通运输/海工装备
-农业机械
-食品机械/烟草机械
-包装机械
-印刷机械/广告设备
-纺织机械
-木工/造纸/环保/医疗设备
-物流设备
-智能楼宇/安防设备
-炉窑/热处理设备
-五金工具
------------------
-工业自动化
-佳工激光网
-仪器/仪表/衡器
-电力设备
-电子/通讯/办公文具
-家电/照明/健康设备
------------------
-基础件/通用件
-标准件
-工业原材料
-电子元器件及材料
-包装材料
------------------
-CAD/CAM/PDM/PLM
-ERP/制造业信息化
-管理咨询/认证
-服务/培训/工业设计
按产品筛选
----------------------
-本行业全部文章
--------------------
-发动机
-汽车电子
-传动/转向/制动系
-汽车与公路设备
-摩托车/自行车
-铁路与轨道交通
-船舶/港口设备/海
-航空与航天设备
查看本类全部文章
R-Car未来泊车辅助系统
newmaker
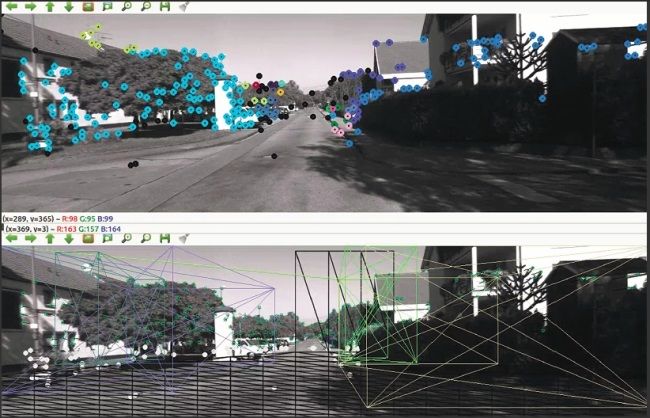
摘要:将强大的三维图像处理、出色的计算机视觉处理和优化的视频采集功能,融合于单芯片的SoC解决方案,是包含多摄像头全景环视功能的未来泊车辅助系统的关键所在。
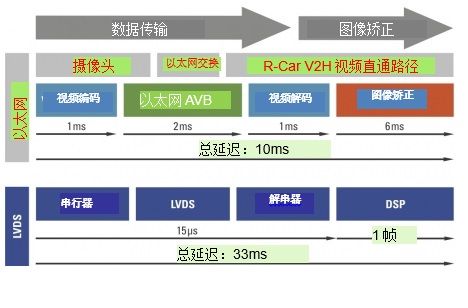
R-Car系列产品还包括R-Car V2H,它提供了一种利用以太网的视频传输方法,从摄像头视频采集直到显示接口。这种流水线方法不仅降低了对系统其余部分(如整体延迟、内存带宽和CPU干预)的要求,而且大大降低了系统制造商软件开发的复杂度。图2展示了R-Car V2H的这种视频路径。从四个摄像头数据的解复用到图像矫正,不需要访问外部存储器,并且每一个摄像头都对应有专用的硬件加速器。
系统成本的降低有助于全景环视的广泛应用,而布线成本是不可忽视的一个部分。近年来出现了2种降低成本的方法,可减小当前基于LVDS的全景环视系统成本。一种是使用非屏蔽双绞线上的以太网传输,另一种方法是更经济的同轴电缆的升级版LVDS传输。两种方法的系统成本差不多。不过,以太网解决方案不仅有助于降低系统成本而且为之后的应用提供了更好的灵活性。例如,随着行车记录系统的使用越来越广泛,只需增加少量成本即可支持新的功能(如多通道同步录像),因为这只需要带有SD卡接口即可实现。相比LVDS,以太网传输的另一个好处在于基于AVnu联盟的MAC层和基于开放联盟的PHY层都是标准化的。
电池 在曝光时同时进行充电,然后成像器开始逐个输出像素。因此,影像捕捉后大概一帧(33ms)左右传输最后一个像素。这个首帧延迟,无法缩短。另一个不可缩短的延迟是影像显示,所有像素都必须在显示影像之前传输完毕,这个延迟也是33ms左右。最后只剩下33ms来执行图3所描述的其他任务。
这个数据传输通路的第一步是数据传输。以太网协议并没有提供专用机制来确保低延迟传输和摄像头同步。这也是瑞萨在R-Car系列产品中首先引入了带高级AVB硬件支持的千兆以太网MAC的原因。这为降低CPU负载和优化整个压缩视频接收提供了必要的硬件支持。一些专门的机制用于实现智能数据包解封和摄像头视频滤波。AVnu联盟AVB协议的汽车规范里定义了对录制视频的快速启动、低延迟(最大延迟为2ms)等多视图摄像头应用的关键技术的考虑。
结论
文章内容仅供参考
(投稿 )
(2/28/2015)
汽车电子论坛 畅所欲言吧!