|
输送设备/机器人 |
|
| 按行业筛选 |
|
|
| 按产品筛选 |
|
|
| |
|
查看本类全部文章 |
| |
|
|
|
|
永不止步 - 移动机器人制造商应对通信和安全挑战 |
|
|
作者:HMS Networks |
|
移动机器人无处不在,从仓库到医院,甚至在街道上。不难理解为何它们如此受欢迎。它们比真正的工人更便宜、更安全、更容易找到,而且效率更高。它们很容易扩展或与其他机器组合。由于移动机器人可以收集大量实时数据,企业可以借助它们来开启工业物联网之旅。
但为了更高效地工作,移动机器人需要安全可靠的通信。本文概述了移动机器人制造商面临的主要的通信和安全挑战,并提供了一个简单的方案来克服这些挑战,以保证移动机器人的正常运行。
什么是移动机器人?
在开始之前,让我们先定义一下移动机器人的含义。
移动机器人可以将材料从一个地方运输到另一个地方,主要有两种类型,自动导引运输车(AGVs)和自主移动机器人(AMRs)。AGV使用导引设施(导引线、反射板或磁带)遵循预定的路线。如果有物体挡住了AGV的去路,AGV会停下来等待,直到该物体被移除。
AMR更具有动态能力。它们通过地图导航,利用相机、内置传感器或激光扫描仪的数据来探测周围环境,并选择最有效的路线。如果有物体阻碍了AMR的一个计划路线,它将选择另一条路线。由于AMR不依赖于导引设施,所以安装起来更快,而且可以适应物流变化。
移动机器人制造商面临的通信和安全挑战是什么?
1. 建立无线连接
移动机器人制造商面临的第一个挑战是选择最合适的无线技术。通常的建议是建立需求、评估标准,并选择最佳的匹配技术。然而,对于移动机器人制造商来说,这并不总是可行的,因为他们通常不知道机器将处于什么位置或者目标应用的确切细节。
有时,蓝牙连接是理想的选择,因为它提供稳定的非拥塞连接,而其他应用则需要高速、安全的蜂窝连接。对于移动机器人制造商来说,重要的是拥有一种易于改变从而能满足特定需求的网络技术。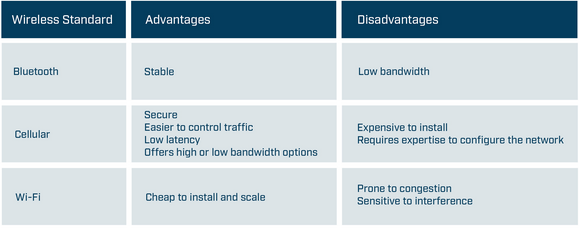
图1:无线标准——高级的优点和缺点
第二个挑战是确保安装按计划进行。在安装无线解决方案之前,根据设施图纸进行预测性的现场勘测,以确保移动机器人在整个现场有足够的信号覆盖。现场勘测应确定接驳站的最佳位置、正确的天线类型、最佳天线角度,以及如何减少干扰。安装完成后,可使用无线嗅探工具检查设计,并根据需要调整接入点或天线。
2. 将移动机器人连接到工业网络
尽管移动机器人和控制器通常使用不同的工业协议,但移动机器人需要与相关的现场控制器进行通信。例如,AGV可能使用CANopen,而控制器可能使用PROFINET。此外,移动机器人制造商可能希望在不同的站点使用相同的AGV型号,而控制器使用的是另一种工业网络,如EtherCAT。
移动机器人制造商还需要确保其产品有足够的能力处理所需的数据量。所需的数据量取决于安装的规模和类型。大型设施可能会使用更多的数据,因为路由算法需要覆盖更大的区域、更多的车辆和更多的潜在路线。视觉导航等导航系统需要处理图像,因此,相较于使用反射板等其他导航系统,需要更强的数据处理能力。所以移动机器人制造商必须解决以下挑战:
他们需要一种支持所有主要现场总线和工业以太网网络的网络技术。
在不改变硬件设计的情况下,需要便捷地改变网络技术,使移动机器人能够在与控制器相同的工业网络上通信。
他们需要确保网络技术具有足够的能力和功能来处理所需的数据。
3. 创建安全的系统
创建一个移动机器人可以安全地运输材料的系统,是一项关键而富有挑战性的任务。移动机器人制造商需要创建一个系统,兼顾所有不同类型的移动机器人、结构和环境中的人。他们需要确保移动机器人能够对外界的动作做出反应,例如有人打开安全门或按下紧急停止按钮,并且其网络解决方案能够处理不同的安全协议和接口。他们需要考虑到AMRs可以自由移动,因而需要相应地管理碰撞风险。传感器领域的技术在不断发展,移动机器人制造商需要紧跟最新的技术,以确保其产品尽可能地更高效。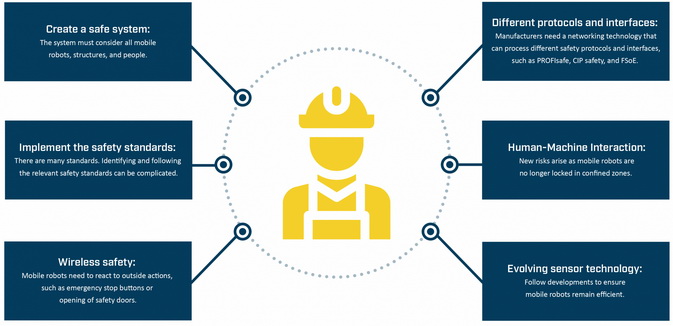
图2:移动机器人制造商面临的安全挑战总览
安全标准
安全标准提供了对于安装安全相关部件,准备环境和维护机器或设备的指引。。
虽然不同的安全标准(ISO、DIN、IEC、ANSI等)大多是自愿遵守的,但在欧盟,机器制造商在法律上被要求遵守欧盟机械指令中的安全标准。2006/42/EC机械指令适用于移动机器人制造商,在某些应用中,2014/30/EU指令也可能是相关的,因为它规定了设备的电磁兼容性。2006/42/EC机械指令描述了对引入欧洲市场的安全机械的设计和制造要求。如果制造商能在符合性声明中证明他们已经满足指令的要求制造商,那么就能够贴上CE标签,并将机器交付给客户。
虽然其他安全标准不是强制性的,但制造商仍应遵守这些标准,因为它们有助于满足2006/42/EC机械指令的要求。例如,制造商可以遵循ISO 12100的指导,将已知的风险降低到可接受的残余风险。他们可以使用ISO 13849或IEC 62061来找到每个风险所需的安全级别,并确保与安全相关的功能相应地符合规定的要求。移动机器人制造商会决定他们如何达到某个的安全水平。例如,他们可以降低移动机器人的速度,以降低碰撞风险和伤害的严重程度到可接受的水平。或者,他们可以确保移动机器人只在禁止人类进入的隔离区域(在ISO 3691-4中定义为限制区域)内工作。
确定正确的标准并按要求实施是移动机器人制造商创建安全系统的最佳方式。但正如本文总结所示,这是一个复杂而耗时的过程。
4. 确保可靠的CAN通信
自20世纪80年代以来,CAN技术是一种可靠且易于实现的标准,基于CAN的通信技术仍然越来越受欢迎,主要是因为它在各种蓬勃发展的行业中得到应用,如电动汽车和电池储能系统(BESS)。CAN简单、节能、经济。位于该网络上的所有设备可以访问所有的信息,并且这是一个开放的标准,这意味着用户可以调整和扩展消息以满足他们的需求。
对于移动机器人制造商来说,建立CAN连接变得更加重要,因为这使他们能够监测在移动机器人驱动系统中越来越多地使用到的锂电池,无论是改造系统还是在全新的安装中都是如此。移动机器人制造商需要做到以下几点:
1. 建立一个可靠的连接到CAN或CANopen的通信标准,使他们能够检查其设备,如监测电池的状态和性能。
2. 保护系统不受电磁干扰(EMI)的影响,因为EMI可以破坏系统的电子设备。电磁干扰风险在改造中是显著的,因为添加了新的组件,如通信电缆旁边的电池,会导致高频电磁干扰。
5. 远程访问移动机器人
远程访问机器人控制系统的能力使移动机器人供应商或工程师能排除故障并解决大多数问题,而无需前往现场。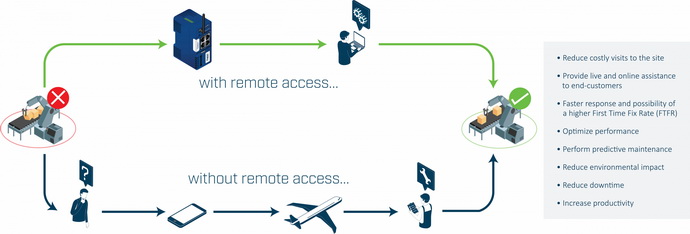
图3:远程访问的好处
挑战在于创建一个远程访问解决方案,以平衡IT部门的需求与工程师或供应商的需求。
IT部门希望确保网络安全、可靠并保持完整性。因此,远程访问解决方案应包括以下安全措施:
使用出站连接而不是入站连接,以将对防火墙的影响降到最低。
将相关流量与网络的其他部分分离。
加密和保护所有流量,以确保其机密性和完整性。
确保供应商的工作符合相关的安全标准,如ISO 27001。
确保供应商完成定期安全审核。
工程师或供应商需要一个易于使用和可靠的系统。用户需要能方便地连接到移动机器人并访问所需的信息。如果安装可能发生变化,那么应该很便捷地根据需要来扩展机器人数量。如果移动机器人与供应商或工程师身处不同的国家,网络基础设施必须有足够的覆盖和冗余,以确保其全球可用性。
结论
正如我们所见,移动机器人制造商必须解决许多通信和安全方面的挑战。他们必须建立无线连接,通过不同的网络发送数据,确保安全,连接到CAN系统,并安全地远程访问机器人。更复杂的是,每个安装都必须重新评估和调整,以满足现场要求。
实现移动机器人通信的最佳实践
移动机器人制造商很少是通信或安全专家。他们会发现在内部尝试和开发所需的通信技术既耗时又昂贵。采用专门构建的第三方通信解决方案不仅解决了当前的通信挑战,还能提供其他益处。
现代通信解决方案采用模块化设计,使移动机器人制造商能够移除针对某一标准或协议设计的网络产品,并将其替换为针对另一标准或协议设计的产品,而不会影响机器的任何其他部分。例如,蓝牙在某一种安装中可能是最适合的无线标准,而Wi-Fi可能在另一种安装中能提供更好的覆盖。类似地,一个站点可能使用PROFINET和PROFIsafe协议,而另一个站点可能使用不同的工业和安全协议。在这两种场景下,移动机器人厂商都能在不改变硬件设计的情况下,通过通信产品来改变网络技术以满足当地需求。
作者:Mark Crossley、Daniel Heinzler、Fredrik Brynolf、Thomas Carlsson
HMS Networks 是来自瑞典的工业通信专家,为AGV通信提供多种解决方案。更多信息,请访问:www.hms-networks.com/agv(end)
|
|
| 文章内容仅供参考
(投稿)
(如果您是本文作者,请点击此处)
(12/19/2022) |
对 输送设备/机器人 有何见解?请到 输送设备/机器人论坛 畅所欲言吧!
|